
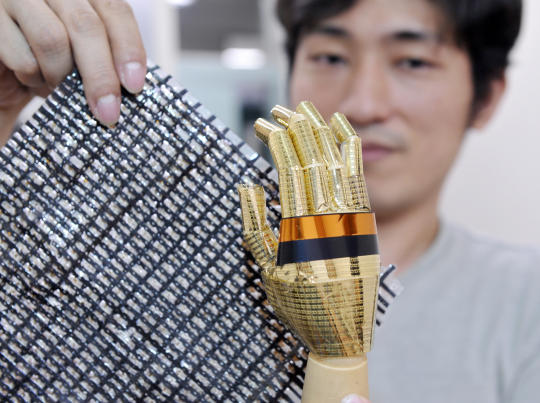
A robotika óriási mértékű fejlődést ért el a látás és hallás érzékeinek replikációjában, ám a szaglás és ízlelés terén jókora lemaradás tapasztalható, a tapintásról már nem is beszélve. Ám most úgy tűnik, hogy a legutolsó hiányosság immáron kipipálható egy nyomásérzékeny elektronikus bőrnek köszönhetően.
Az elektronikus bőr germániumból és szilíciumból készült, amit egy vékony, ragadós poliimid rétegre helyeztek. A prototípus felülete nagyjából 50 négyzetcentiméter, s 0-15 kilopascal közti nyomás érzékelésére képes, ami azt jelenti, hogy egyaránt képes érzékelni egy gépelő ujjbegyre és egy több kilós tárgyat tartó tenyérfelületre eső nyomást is. Mindez a „bőr” különleges kidolgozású gumifelületének köszönhető, ami a nyomásra válaszolva változtatja a vastagságát, a belső érzékelők pedig éppen ezt a változást mérik, illetve kontrollálják beépített kondenzátorok segítségével.
 A tervezőcsapat egyik tagja, Ali Javey elmagyarázta, hogy miért elengedhetetlen a fejlett tapintás-érzékelés a robotok hasznossága szempontjából. „Az ember alapvetően tisztában van vele, hogy miként fogjon meg és tartson a kezében egy törékeny tárgyat, például egy tojást. Ha valaha is olyan robotot akarunk építeni, ami példának okáért képes megteríteni egy asztalt, biztosra kell mennünk, hogy a robot ne törje szét a tányérokat. Emellett viszont arra is ügyelnünk kell, hogy a robot meg tudja tartani a leveses-fazekat.”
A tervezőcsapat egyik tagja, Ali Javey elmagyarázta, hogy miért elengedhetetlen a fejlett tapintás-érzékelés a robotok hasznossága szempontjából. „Az ember alapvetően tisztában van vele, hogy miként fogjon meg és tartson a kezében egy törékeny tárgyat, például egy tojást. Ha valaha is olyan robotot akarunk építeni, ami példának okáért képes megteríteni egy asztalt, biztosra kell mennünk, hogy a robot ne törje szét a tányérokat. Emellett viszont arra is ügyelnünk kell, hogy a robot meg tudja tartani a leveses-fazekat.”
Ez az elv természetesen nem csak a háztartásbéli munkákra vonatkozik - csak gondoljunk bele, hogy jelenleg is hány olyan munkafolyamat létezik a részben automatizált gyárakban, amelyek elvégzésére a robotok és az automaták egyszerűen alkalmatlanok. Még az egyszerű mozgássorok is, mint az öltözködés vagy a lapozás is részben intuícióra épülő tapintás- és nyomásérzékelést kívánnak, ami talán éppen ezzel az új technológiával válik majd lehetővé a jövő gépei számára.
Az elektronikus bőr határozottan áttörés, ám a széles tartományban történő nyomásérzékelés aligha helyettesítheti a biológiai bőrben található kifinomult receptorokat. Az ember esetében számos egyéb érzet kapcsolódik a nyomás érzékeléséhez: hő, fájdalom, vibráció, satöbbi. Persze ha sikerül megalkotnunk egy adott érzékelő-típust, akkor már semmi sem állhatja útját a továbbiak kifejlesztésének, s a robotok ily módon bármilyen jellegű képességgel felruházhatóak majd: érintéssel akár a tárgyak biokémiai összetételét és sugárzási szintjüket is megállapíthatják a jövőben. Ezzel nagyságrendekkel megnőne a robotok bevethetősége az ember számára veszélyes munkaterületeken.
Sőt, ezzel a technológiával akár vissza lehetne adni a tapintás érzékét olyan embereknek, akik valamilyen egészségügyi okból elvesztették azt, ám a kutatásvezető Zhenan Bao szerint mindez még a jövő zenéje.
„A mesterséges bőr és az emberi idegrendszer ilyen kifinomult szinten történő összekapcsolása nagyon nagy kihívás. A távoli jövőben végső soron már olyan mesterséges bőrt készítenénk, ami alapvetően úgy működne, mint az emberi bőr, s képes sejtszinten összekapcsolódni a kéz idegeivel, visszaadva ezzel a tapintás érzését. Kezdetben egy hordozható eszköz képében képzeljük el a prototípust, vagy talán egy olyan berendezésként, ami közvetlen kapcsolatban áll a bőr más, érzékeny részeivel. Utóbbi képes lenne a beérkező jelet biológiailag érzékelhető ingerületté alakítani, amit átadhat a bőr más részeinek. Így a jel alapvetően nem lenne több annál, minthogy a „pótvégtagom megérintett valamit”, de kezdetben ez is óriási segítség lenne a rászorulóknak.”
Részletek: Tokyoi Egyetem - Takao Someya Group




Utolsó kommentek